
3D相機選型指南
一、前言
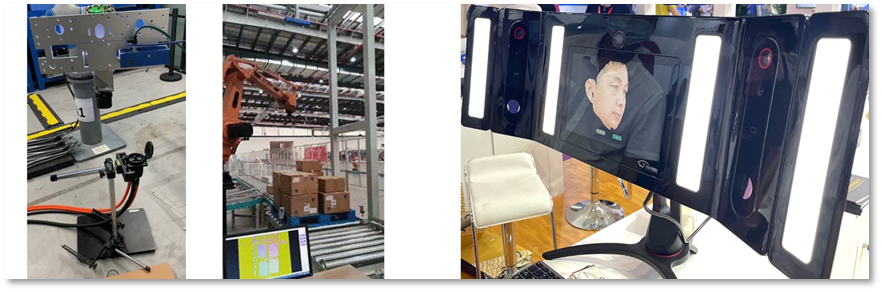
3D相機的應用在我們身邊已是越來越常見。在工業(yè)場景中,如自動化工廠的抓取上下料、焊接打磨切割、生產(chǎn)過程中產(chǎn)品檢測、拆碼垛等應用。而在消費 端,人們常見的無人售貨機的刷臉支付,小區(qū)學校高鐵站等布置的人臉識別門禁,牙科里牙齒的模型掃描,醫(yī)美行業(yè)面部美容前后的三維重建等。可見,3D相機的選型在視覺項目開發(fā)與部署中占據(jù)著舉足輕重的地位。
如何更好的選擇一款合適的3D相機,首先我們需要認識3D相機的主要原理有哪些,不同工作原理的優(yōu)劣勢是怎樣的,不同廠商3D相機的主要特征、重要參數(shù)是怎樣的。只有對這些內(nèi)容進行深入的了解,才能為項目挑選到合適的3D相機,加速項目落地。
二、3D相機的主要成像原理及其優(yōu)劣勢
2.1 主流3D成像方案
2.1.1雙目視覺原理
雙目立體視覺由三角法原理進行三維信息的獲取,即由兩個攝像機的圖像平面與被測物體之間構成一個三角形。已知兩個攝像機之間的位置關系和物體在左右圖像中的坐標,便可以解算出兩攝像機公共視場內(nèi)物體的空間位置信息。所以,雙目視覺系統(tǒng)一般由兩個攝像機構成。其原理圖如下所示:
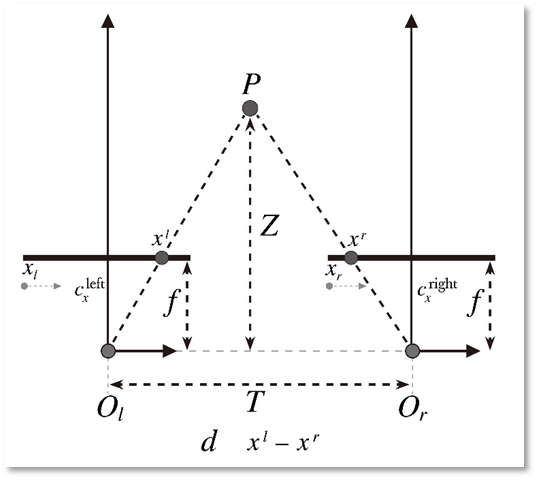
根據(jù)相似三角形得到以下等式進而推算出Z:

2.1.2激光三角測量原理
如下圖所示,激光頭與攝像頭在同一水平線(稱為基準線)上,其距離為s,攝像頭焦距為f,激光頭與基準線的夾角為β。假設目標物體在點狀激光器的照射下,反射回攝像頭成像平面的位置為點P。
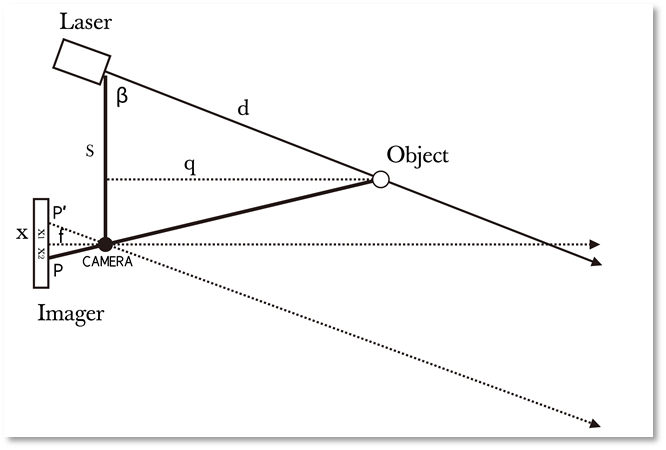
由幾何知識相似三角形可得:f/x=q/s ==> q=fs/x
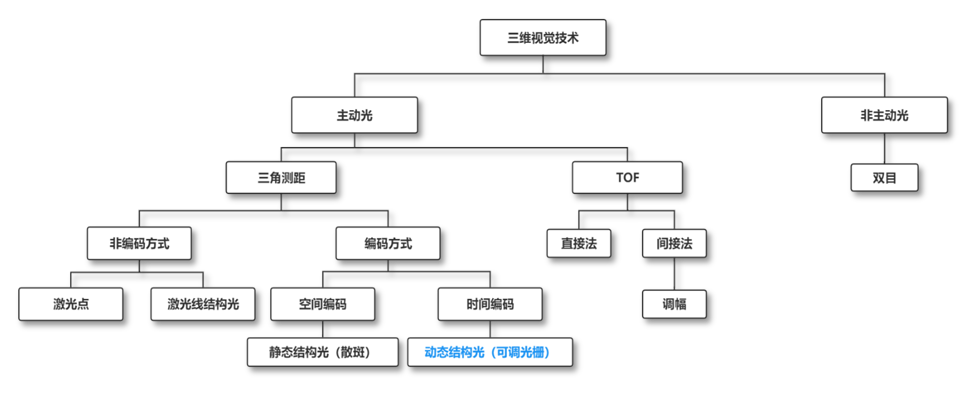
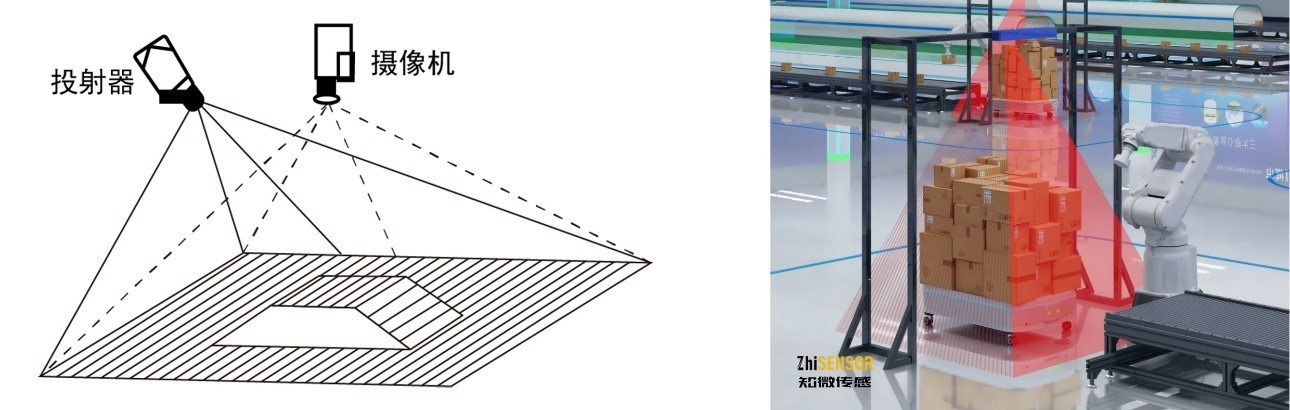
2.1.3結構光3D成像原理
結構光法屬于主動式測量,通過投射器將編制好的編碼結構光投射到物體表面,編碼結構光經(jīng)過物體表面高度的調(diào)制后產(chǎn)生扭曲并被攝像機接收,通過后期圖像處理和解碼完成像素點匹配,最后基于三角測量原理實現(xiàn)物體的三維重建。
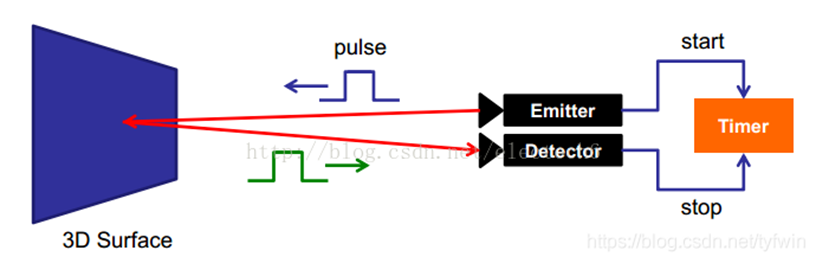
2.1.4 TOF(Time Of Flight)成像原理
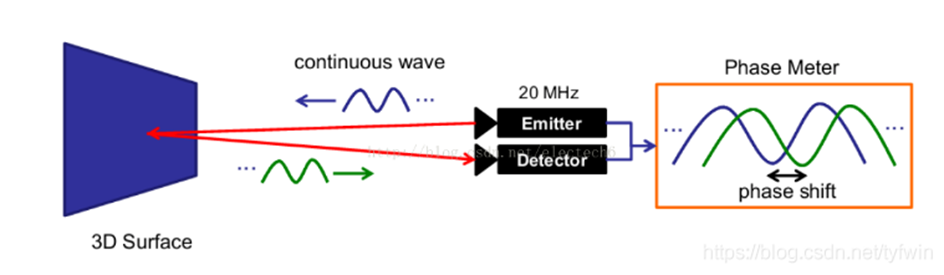
TOF是通過連續(xù)或脈沖波打在物體表面,再通過傳感器接收返回的光,通過測量波的飛行時間測得物體的距離,根據(jù)調(diào)制方法的不同,一般可以分為兩種:脈沖調(diào)制(Pulsed Modulation)和連續(xù)波調(diào)制(Continuous Wave Modulation)。
脈沖調(diào)制:脈沖調(diào)制方案的原理比較簡單,如下圖所示。它直接根據(jù)脈沖發(fā)射和接收的時間差來測算距離。
連續(xù)波調(diào)制:實際應用中,通常采用的是正弦波調(diào)制。由于接收端和發(fā)射端正弦波的相位偏移和物體距離攝像頭的距離成正比,因此可以利用相位偏移來測量距離。
2.2主流成像方案優(yōu)劣勢簡述
在光源的依賴性上:基于主動光技術的三維成像,其成像時內(nèi)部自帶光源,不依賴外部環(huán)境光,而非主動光技術的雙目方案,其成像則依靠外界光,無法適應昏暗的應用場景。
在成像質(zhì)量與精度上:線激光結構光方案(絲級)>條紋光柵結構方案(亞毫米級)>散斑結構光方案(毫米級)>TOF方案(厘米級)。
在成像速度上:TOF方案>散斑結構光方案>條紋光柵結構光方案>線激光結構光方案。
三、3D相機選型需關注的典型指標
3.1 3D相機分辨率與像元
分辨率作為相機的基本參數(shù)之一,是指傳感器(CCD或CMOS)芯片靶面排列的像元數(shù)量。
面陣相機的分辨率用水平和垂直分辨率表示,如:1280(寬)× 1024(高)。線陣相機的分辨率通常表示為K,如1K(1024),表示一行由1024個像元。在對同樣大的物體成像時,分辨率越高,能夠顯示更多細節(jié)。
3.2 3D相機的幀率及成像時間
成像時間,一般約定為成像的延時,包含:投射+拍攝+點云計算+數(shù)據(jù)傳輸?shù)倪^程的耗時。
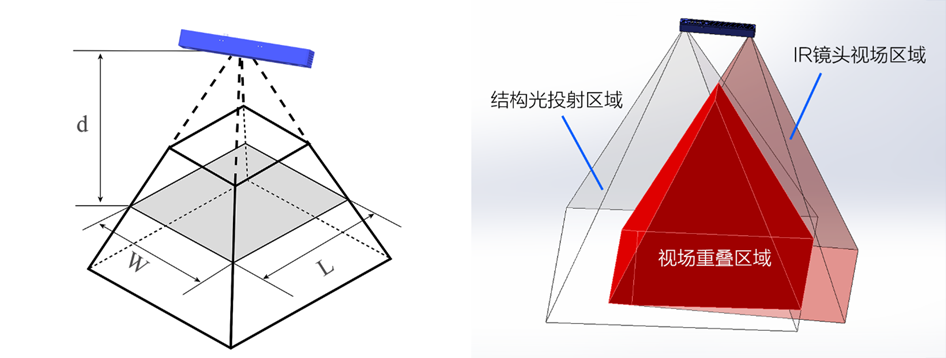
3.3 3D相機的FOV
以單目結構光相機為例,其有效的視場范圍為其結構光投射器的視場與其鏡頭成像視場的重疊區(qū)域為有效區(qū)域。如下圖紅色區(qū)域為有效視場范圍:
3.4 3D相機的工作距離和景深
工作距離指3D相機的最近端的拍攝離被測物表面的距離及最遠的距離的區(qū)間,景深是指最近端和最遠端的工作距離的差值。
對于景深的選擇,以普通的深框抓取為例,定義料框大小為長寬高=500mm*500mm*1000mm,其W和H方向的點云需要覆蓋700mm*500mm,咱們在選型的時候需要確定其能滿足這個視野時相機的工作距離,同時,在該距離下再加上料框的高度即為相機實際需要架高的高度,料框的高度即為我們選型相機時需要的景深。在大景深相機的選擇上,以MEMS振鏡為投射核心元器件的3D相機具有較大景深的特點,其景深最大可達2米,可滿足大型拆碼垛等應用場景。
3.5 3D相機的精度
精度測量有多個方面:①重復精度:多次測量的重復測量結果的誤差;②相對平面度:取平面上的數(shù)十萬個點云,擬合平面計算RMS值。
在精度的選型上,需要跟據(jù)場景需要的精度指標來進行合理選擇,如TOF目前可達厘米級,散斑結構光達毫米級,以MEMS振鏡為核心投射元器件的條紋結構光則可達亞毫米級。
3.6 3D相機的體積和重量
取決于相機的安裝方式,及選用機械臂的負載,如果相機放在機械臂末端的話,需要考慮到機械臂的負載大小來對相機的重量選型,根據(jù)現(xiàn)場是否存在干涉來考慮對相機體積選型。
知微傳感目前已發(fā)布的3D相機均采用以MEMS振鏡投射器投射結構光,其MEMS振鏡投射器體積與重量與DLP光機相比,具有顯著的優(yōu)勢。

3.7 觸發(fā)信號
相機分為軟觸發(fā)和硬觸發(fā)兩種模式,軟觸發(fā)是通過調(diào)用廠商提供的軟件SDK接口來觸發(fā)相機進行拍照;硬觸發(fā)是以外部信號源觸發(fā)相機進行拍照,硬觸發(fā)多為IO 觸發(fā):需給上升沿或者下降沿(數(shù)字電平從低電平(數(shù)字“0”)變 為高電平(數(shù)字“1”)的那一瞬間(時刻)叫作上升沿。)。
四、小結
沒有最好的3D相機,只有最適合應用場景的3D相機,我們要根據(jù)現(xiàn)場的應用場景需要覆蓋的視野、需要的節(jié)拍,對應的精度等綜合選擇相機。
五、知名3D相機廠商推薦
3D相機哪家品牌好呢?小編給大家推薦一家國內(nèi)自主研發(fā)的品牌——知微傳感(Zhisensor)。
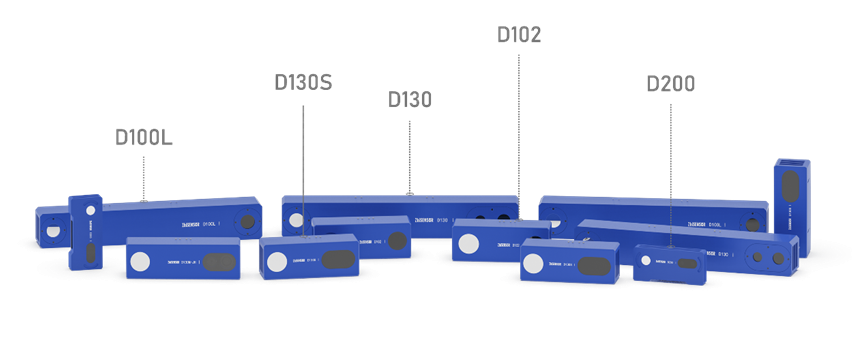
知微傳感為國內(nèi)知名的3D相機硬件提供商,其研制的3D相機采用自主研發(fā)的MEMS振鏡為投射核心元器件,結合紅外激光光源,實現(xiàn)光柵動態(tài)結構光投射,再利用三角測距法獲知被測物的三維信息。該系列產(chǎn)品具有精度高,體積小,重量輕,性價比高等優(yōu)勢,目前已廣泛應用在上下料,無序分揀,拆碼垛,切割焊接打磨等領域。

免責聲明:上面部分資料和圖片來自網(wǎng)絡或?qū)W術期刊,如有侵權,請及時聯(lián)系作者,我們會第一時間處理。